Welcome to Subscribe On Youtube
1697. Checking Existence of Edge Length Limited Paths
Description
An undirected graph of n nodes is defined by edgeList, where edgeList[i] = [ui, vi, disi] denotes an edge between nodes ui and vi with distance disi. Note that there may be multiple edges between two nodes.
Given an array queries, where queries[j] = [pj, qj, limitj], your task is to determine for each queries[j] whether there is a path between pj and qj such that each edge on the path has a distance strictly less than limitj .
Return a boolean array answer, where answer.length == queries.length and the jth value of answer is true if there is a path for queries[j] is true, and false otherwise.
Example 1:
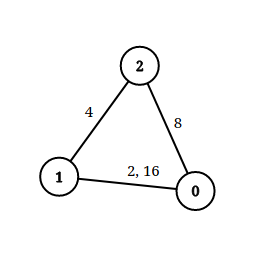
Input: n = 3, edgeList = [[0,1,2],[1,2,4],[2,0,8],[1,0,16]], queries = [[0,1,2],[0,2,5]] Output: [false,true] Explanation: The above figure shows the given graph. Note that there are two overlapping edges between 0 and 1 with distances 2 and 16. For the first query, between 0 and 1 there is no path where each distance is less than 2, thus we return false for this query. For the second query, there is a path (0 -> 1 -> 2) of two edges with distances less than 5, thus we return true for this query.
Example 2:
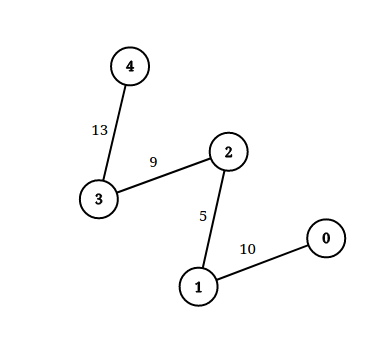
Input: n = 5, edgeList = [[0,1,10],[1,2,5],[2,3,9],[3,4,13]], queries = [[0,4,14],[1,4,13]] Output: [true,false] Explanation: The above figure shows the given graph.
Constraints:
2 <= n <= 1051 <= edgeList.length, queries.length <= 105edgeList[i].length == 3queries[j].length == 30 <= ui, vi, pj, qj <= n - 1ui != vipj != qj1 <= disi, limitj <= 109- There may be multiple edges between two nodes.
Solutions
Union find.
-
class Solution { private int[] p; public boolean[] distanceLimitedPathsExist(int n, int[][] edgeList, int[][] queries) { p = new int[n]; for (int i = 0; i < n; ++i) { p[i] = i; } Arrays.sort(edgeList, (a, b) -> a[2] - b[2]); int m = queries.length; boolean[] ans = new boolean[m]; Integer[] qid = new Integer[m]; for (int i = 0; i < m; ++i) { qid[i] = i; } Arrays.sort(qid, (i, j) -> queries[i][2] - queries[j][2]); int j = 0; for (int i : qid) { int a = queries[i][0], b = queries[i][1], limit = queries[i][2]; while (j < edgeList.length && edgeList[j][2] < limit) { int u = edgeList[j][0], v = edgeList[j][1]; p[find(u)] = find(v); ++j; } ans[i] = find(a) == find(b); } return ans; } private int find(int x) { if (p[x] != x) { p[x] = find(p[x]); } return p[x]; } } -
class Solution { public: vector<bool> distanceLimitedPathsExist(int n, vector<vector<int>>& edgeList, vector<vector<int>>& queries) { vector<int> p(n); iota(p.begin(), p.end(), 0); sort(edgeList.begin(), edgeList.end(), [](auto& a, auto& b) { return a[2] < b[2]; }); function<int(int)> find = [&](int x) -> int { if (p[x] != x) p[x] = find(p[x]); return p[x]; }; int m = queries.size(); vector<bool> ans(m); vector<int> qid(m); iota(qid.begin(), qid.end(), 0); sort(qid.begin(), qid.end(), [&](int i, int j) { return queries[i][2] < queries[j][2]; }); int j = 0; for (int i : qid) { int a = queries[i][0], b = queries[i][1], limit = queries[i][2]; while (j < edgeList.size() && edgeList[j][2] < limit) { int u = edgeList[j][0], v = edgeList[j][1]; p[find(u)] = find(v); ++j; } ans[i] = find(a) == find(b); } return ans; } }; -
class Solution: def distanceLimitedPathsExist( self, n: int, edgeList: List[List[int]], queries: List[List[int]] ) -> List[bool]: def find(x): if p[x] != x: p[x] = find(p[x]) return p[x] p = list(range(n)) edgeList.sort(key=lambda x: x[2]) j = 0 ans = [False] * len(queries) for i, (a, b, limit) in sorted(enumerate(queries), key=lambda x: x[1][2]): while j < len(edgeList) and edgeList[j][2] < limit: u, v, _ = edgeList[j] p[find(u)] = find(v) j += 1 ans[i] = find(a) == find(b) return ans -
func distanceLimitedPathsExist(n int, edgeList [][]int, queries [][]int) []bool { p := make([]int, n) for i := range p { p[i] = i } sort.Slice(edgeList, func(i, j int) bool { return edgeList[i][2] < edgeList[j][2] }) var find func(int) int find = func(x int) int { if p[x] != x { p[x] = find(p[x]) } return p[x] } m := len(queries) qid := make([]int, m) ans := make([]bool, m) for i := range qid { qid[i] = i } sort.Slice(qid, func(i, j int) bool { return queries[qid[i]][2] < queries[qid[j]][2] }) j := 0 for _, i := range qid { a, b, limit := queries[i][0], queries[i][1], queries[i][2] for j < len(edgeList) && edgeList[j][2] < limit { u, v := edgeList[j][0], edgeList[j][1] p[find(u)] = find(v) j++ } ans[i] = find(a) == find(b) } return ans } -
impl Solution { #[allow(dead_code)] pub fn distance_limited_paths_exist( n: i32, edge_list: Vec<Vec<i32>>, queries: Vec<Vec<i32>> ) -> Vec<bool> { let mut disjoint_set: Vec<usize> = vec![0; n as usize]; let mut ans_vec: Vec<bool> = vec![false; queries.len()]; let mut q_vec: Vec<usize> = vec![0; queries.len()]; // Initialize the set for i in 0..n { disjoint_set[i as usize] = i as usize; } // Initialize the q_vec for i in 0..queries.len() { q_vec[i] = i; } // Sort the q_vec based on the query limit, from the lowest to highest q_vec.sort_by(|i, j| queries[*i][2].cmp(&queries[*j][2])); // Sort the edge_list based on the edge weight, from the lowest to highest let mut edge_list = edge_list.clone(); edge_list.sort_by(|i, j| i[2].cmp(&j[2])); let mut edge_idx: usize = 0; for q_idx in &q_vec { let s = queries[*q_idx][0] as usize; let d = queries[*q_idx][1] as usize; let limit = queries[*q_idx][2]; // Construct the disjoint set while edge_idx < edge_list.len() && edge_list[edge_idx][2] < limit { Solution::union( edge_list[edge_idx][0] as usize, edge_list[edge_idx][1] as usize, &mut disjoint_set ); edge_idx += 1; } // If the parents of s & d are the same, this query should be `true` // Otherwise, the current query is `false` ans_vec[*q_idx] = Solution::check_valid(s, d, &mut disjoint_set); } ans_vec } #[allow(dead_code)] pub fn find(x: usize, d_set: &mut Vec<usize>) -> usize { if d_set[x] != x { d_set[x] = Solution::find(d_set[x], d_set); } return d_set[x]; } #[allow(dead_code)] pub fn union(s: usize, d: usize, d_set: &mut Vec<usize>) { let p_s = Solution::find(s, d_set); let p_d = Solution::find(d, d_set); d_set[p_s] = p_d; } #[allow(dead_code)] pub fn check_valid(s: usize, d: usize, d_set: &mut Vec<usize>) -> bool { let p_s = Solution::find(s, d_set); let p_d = Solution::find(d, d_set); p_s == p_d } }